
Spis treści
To, co jeszcze kilka lat temu wydawało się mrzonką lub marketingowym chwytem, właśnie stało się faktem. Tesla Model 3 pokonała trasę z zachodniego na wschodnie wybrzeże Stanów Zjednoczonych bez ani jednej interwencji kierowcy. Choć system wciąż nosi nazwę „Nadzorowanego” (Supervised), to samochód podjął 100 procent decyzji samodzielnie – od włączenia się do ruchu w Los Angeles, aż po parkowanie w Karolinie Południowej.
Obietnica spóźniona o osiem lat
Wróćmy na chwilę do października 2016 roku. To wtedy Elon Musk, prezentując drugą generację Autopilota, rzucił śmiałą tezę. Według niego, przejazd autonomiczny „coast-to-coast” (od wybrzeża do wybrzeża) miał być możliwy do końca 2017 roku. Rzeczywistość brutalnie zweryfikowała te plany. Technologia nie była gotowa, a kolejne wersje oprogramowania, choć coraz lepsze, wciąż wymagały pomocy człowieka w trudniejszych sytuacjach.
Musieliśmy czekać aż do teraz, by zobaczyć realizację tej wizji. Davis Moss, właściciel Tesli Model 3 w kolorze Stealth Gray, pokonał dystans 4 397 kilometrów (2 732 mil) w trybie pełnej autonomii. Jego podróż rozpoczęła się przy słynnym Tesla Diner w Los Angeles, a zakończyła w Myrtle Beach w Karolinie Południowej. Całość zajęła 2 dni i 20 godzin. Przez ten czas kierowca ani razu nie musiał przejmować kontroli nad kierownicą czy pedałami.
Technologia, która „widzi” i myśli
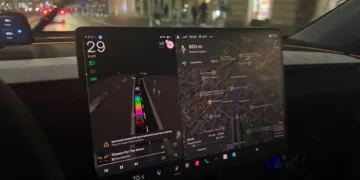
Kluczem do sukcesu okazało się połączenie najnowszego sprzętu i oprogramowania. Samochód Mossa wyposażony jest w komputer Hardware 4 (AI4), który charakteryzuje się znacznie wyższą mocą obliczeniową i lepszymi kamerami niż starsze modele. Na pokładzie zainstalowano wersję systemu FSD v14.2.1.25.
To właśnie oprogramowanie oznaczone numerem 14 wydaje się być „game changerem”. Moss zaznaczył, że system radził sobie nie tylko na autostradach, co potrafią już starsze wersje, ale także w najbardziej newralgicznych momentach. Samochód samodzielnie zjeżdżał na stacje Supercharger i parkował pod ładowarkami. Dla każdego, kto korzystał z wcześniejszych wersji FSD, brzmi to imponująco. Zazwyczaj to właśnie manewry na parkingach i skomplikowane dojazdy do ładowarek wymuszały interwencję człowieka.
Moss w swojej relacji podkreślił, że nie odnotował żadnych sytuacji „pod bramką” (close calls). System prowadził pewnie, płynnie i przewidywalnie. Z danych społecznościowych wynika, że ten konkretny egzemplarz Tesli przejechał ostatnie 17 tysięcy kilometrów (ponad 10 tysięcy mil) używając FSD przez 100% czasu jazdy. To sugeruje, że nie mamy do czynienia z jednorazowym łutem szczęścia, ale z powtarzalną wydajnością systemu.
Reakcje z samej góry
Wyczyn Davisa Mossa nie umknął uwadze zarządu Tesli. Ashok Elluswamy, wiceprezes ds. oprogramowania AI, oficjalnie pogratulował kierowcy, nazywając to wydarzenie „pierwszym na świecie w pełni autonomicznym przejazdem od wybrzeża do wybrzeża wykonanym na FSD v14”. Również Elon Musk oraz oficjalne konto Tesli na platformie X (dawniej Twitter) udostępnili tę informację, traktując ją jako dowód na słuszność obranej ścieżki rozwoju opartej wyłącznie na kamerach i sieciach neuronowych.
Innew podobnym temacie




Dla inżynierów Tesli to ogromna ulga i dowód koncepcji. Przez lata krytycy zarzucali firmie, że rezygnacja z radarów i czujników ultradźwiękowych (USS) to ślepa uliczka. Tymczasem Model 3 Mossa, opierając się wyłącznie na systemie wizyjnym („Tesla Vision”), poradził sobie z tysiącami kilometrów zmiennych warunków drogowych, remontów, skrzyżowań i ruchu miejskiego.
Co to oznacza dla zwykłego kierowcy?
Musimy jednak zachować pewną dozę sceptycyzmu. Sukces jednego kierowcy, nawet na tak długiej trasie, nie oznacza, że od jutra nasze auta staną się w pełni autonomicznymi taksówkami.
Po pierwsze, system wciąż nosi przydomek „Supervised” (Nadzorowany). Davis Moss siedział za kierownicą, obserwował drogę i był gotowy do przejęcia kontroli w każdej sekundzie. To, że nie musiał tego robić, jest sukcesem technologicznym, ale prawnie odpowiedzialność wciąż spoczywa na człowieku. Do momentu, gdy będziemy mogli legalnie spać lub czytać książkę podczas jazdy (poziom 3 lub 4 autonomii), długa droga legislacyjna.
Po drugie, warunki pogodowe i drogowe bywają różne. Przejazd Mossa odbył się w konkretnych okolicznościach. Nie wiemy, jak system w wersji v14 poradziłby sobie podczas gęstej śnieżycy w Dakocie Północnej czy ulewy na Florydzie, która zalewa kamery. Niemniej, stabilność działania na dystansie ponad 4000 km pokazuje, że systemy oparte na sieciach neuronowych (end-to-end neural nets) uczą się w tempie wykładniczym.

Przyszłość dzieje się teraz
Ten przejazd to sygnał dla całej branży. Konkurencja, która często polega na precyzyjnych mapach HD i lidarach (jak Waymo), jest ograniczona do konkretnych obszarów geograficznych (geofencing). Tesla udowadnia, że jej podejście jest bardziej uniwersalne. Samochód Mossa nie potrzebował wcześniej zeskanowanej trasy w wysokiej rozdzielczości – po prostu „patrzył” na drogę i podejmował decyzje w czasie rzeczywistym, tak jak robi to ludzki kierowca.
Rok 2026 (jeśli przyjmiemy kontekst poprzednich wiadomości) lub końcówka 2025 przynosi nam technologię, która jeszcze niedawno była domeną filmów science-fiction. Samochód, który wyjeżdża z parkingu w LA i sam zawozi nas na wschodnie wybrzeże, zatrzymując się tylko na ładowanie, to wizja, która właśnie zmaterializowała się na asfalcie.
Pytanie brzmi: czy zaufalibyście elektronice na tyle, by pozwolić jej wieźć się przez cały kontynent, czy jednak wolicie trzymać ręce na kierownicy? Dajcie znać w komentarzach, czy ten wyczyn przekonuje was do autonomii, czy wciąż traktujecie to jako technologiczną ciekawostkę.






Dołącz do dyskusji